Construction and equipment engineering
Phoenix Contact relies on an ARBURG turnkey solution that combines efficient automation with high article variance.
USA English
Phoenix Contact relies on an ARBURG turnkey solution that combines efficient automation with high article variance.
Production concept with ARBURG turnkey system combines high article variance with automation.
Cycle times reduced by a third and mold and gripper set-up time halved.
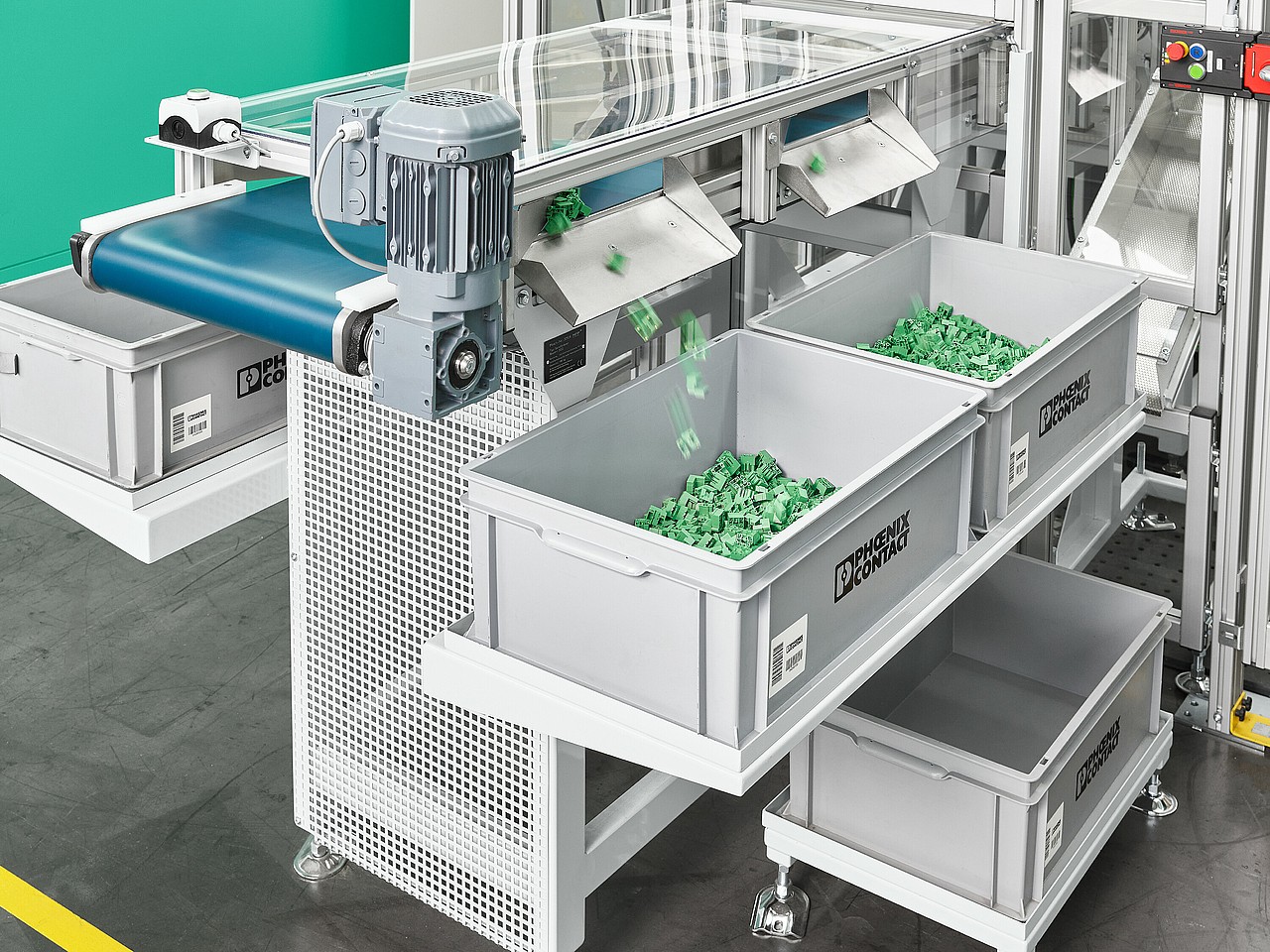
After quality control and with no finishing work, only flawless parts leave the system.

Phoenix Contact is a global market leader in electrification, cross-linking and automation, with device connection technologies used in fields such as electromobility. Its new turnkey system had to produce 159 different base strips with flange geometry including overmolded bushings with internal threads for five different product families in a fully automated process. But that wasn't the only challenge: flawless parts had to be produced in short cycle times with no finishing work.
The decision was made to use a turnkey solution based around an electric ALLROUNDER 470 A. A Kuka Agilus articulated arm robot picks up the individually conveyed bushings and places them at predefined positions on a moving mold platen for transfer. The moving mold platen and gripper each fit a mold cassette with one, two or four cavities. The mold platens that are not currently in use are stored on two gripper trolleys that can be moved to the system for an easier changeover.
A MULTILIFT V linear robotic system picks up the bushings, inserts them into the mold and simultaneously removes the sprue and molded parts. The sprue is discharged into a sprue grinder, where it is regranulated and returned to the process. The bushings are inductively tested, subjected to a quality check and then thrown into transport containers separated by cavity.
Thanks to the new machine mold concept, the high requirements for short cycle times have not only been met, but far exceeded. In future, this will enable series production and product diversity with just one system.
“We are combining article variance with automation – and we're doing so with high product quality and low cycle and set-up times.”
Bernd Laumann, Team Manager Injection Molding Projects PCC for Device Connectors
Are you integrating complex functions, overmolding inserts or additively processing conductive material? We offer a host of solutions for the electronics sector.
